Retargetting Motion to New Characters
Michael Gleicher
Presented By: Ying-Huey Fua
Email: yingfua@cs.wpi.edu
Course: CS563 (24 Feb 1999)
Introduction
Motivation
Previous Work
Motion Representation
Inverse Kinematics
vs Space-Time Constraints
Outline of Retargetting
Algorithm
Conclusion
Acknowledgments
![[Return to cs563 '99 talk list]](back.gif)
Introduction
This paper addresses the problem of how to reuse motion by adapting
existing ones to new circumstances, that is, how motion is reused by "retargetting"
one that is good for one character to another character.
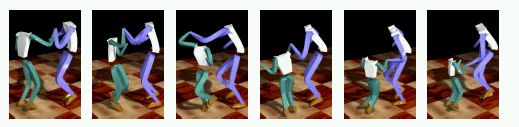
Retargetting motion to new characters is
a new technique for adapting an animated motion from one character onto
another similar but different character. That is, the new character must
have an identical structure but may have different segment lengths.
And structure refers to the connectivity of limbs, the types of joints
and the number of degrees of freedom.
Moreover, the adaptation is independent of how the motion was created.
For instance, the motion could have been recorded, physically simulated
or manually keyframed by a 3D artist.
In the course of adaptation, they want to preserve as many desirable
aspects of the original motion as possible. For instance, in a walking
motion, the walking style should be preserved and recognizable in the adapted
motion.
The adaptation must also satisfy motion constraints. For example, it
is important that the feet touched the ground at each step in a walking
motion or the hands holding onto the ladder while climbing. These constraints
are identified as geometric constraints in the paper.

Motivation
Existing motion are only applicable to the character they are created
for, hence other similar characters cannot easily reuse these motions.
Currently, there is no easy way out, except to have the animator manually
tweak the motion in each keyframe.
Previous Work
Manual Tweaking.
This is perhaps the most primitive method and no doubt the most laborious
process. Moreover, there is no guarantee that the end result would
resemble the original motion.
Re-generate the motions.
Reference:
-
J. Hodgins & N. Pollard. Adapting simulated behaviours for new characters.
SIGGRAPH '97 Proceedings.
In re-generation of motions, the parameters of the physical simulation
are adjusted to adapt a controller for use with the new character. However,
this risks losing qualities of the original motion.
Treat motion as time-varying signals and apply
signal processing techniques to these signals.
Some references:
-
C. Litwinowicz. Inkwell: A 21/2-D animation system.
SIGGRAPH '91 Proceedings.
-
K. Perlin. Real-time responsive animation with personality. IEEE Transactions
on Visualization and Computer Graphics, March 1995.
-
A. Brudelin & L. Williams. Motion Signal Processing. SIGGRAPH '95 Proceedings.
The technique described in this paper falls under this category.
Motion Representation
What is a configuration?
A configuration of a character is an N-dimensional vector where n is
the number degrees of freedom of the character. The number of degrees of
freedom is obtained by enumerating all the possible joint actions in the
body. For example, the elbow has 1 degree of freedom, the ankle has 2 and
the shoulder has 3.
The root of the hierarchy often located at the hips, has 3 translational
degrees of freedom, and this translational degrees of freedom serves to
move the figure in space.
By collecting all the translational and rotational degrees of freedom
into one vector, we obtain the configuration
of the figure.
What is a motion?
When the configuration is a time-varying function, we obtain a motion
denoted by m(t).
Mathematically, motion retargetting can be formulated as follows:
m(t) = m0(t) + d(t)
where m is the adapted motion, m0 is the original motion and
d is the displacement vector that when added to the original motion results
in the desired targetted motion.
In this technique, motion is represented as cubic B-splines with uniformly
spaced control points. The advantage of B-splines are that they are inherently
smooth, hence the amount of high frequencies is limited by the representation
itself.
Inverse
Kinematics vs Space-Time Constraints
The basic features that must be present in the adapted motion are identified
as constraints. And there are two basic techniques to preserve these constraints:
-
Inverse Kinematics (IK)
-
Space-Time Constraints
| Inverse Kinematics (IK) |
Space-time Constraints |
| A common technique for positioning end effectors of an articulated
figure in individual frames of an animation |
A technique that solves for a character's motion by subjecting the
motion to a set of constraints over the entire time interval of interest.
The desired motion is expressed as objective function to be minimized subject
to the given constraints. |
Disadvantage:
-
Does not consider the motion as a whole
-
Result in undesirable artifacts, e.g. jerkiness
-
No frame-to-frame consistency
|
Advantage over IK:
Poses a large problem over a duration of motion, rather than individual
frame.
Able to look-ahead or behind in the optimal motion.
|
In this technique, only geometric constraints are considered, physical
laws of motion are ignored. Hence, the result may no longer be physically
plausible, even when all constraints are satisfied.
Outline
of Retargetting Algorithm
Step 1:
Begin with an initial motion with identified constraints.
These constraints can either come from:
restrictions on the character, such as elbows
do not bend backwards.
the environment, such as nothing should be below the floor.
the motion, such as the character must pick up the box in frame
30.
Note: In this technique, they only dealt with equality constraints.
Step 2:
Find an initial estimate m1(t) of the solution.
scale translational parameters.
add translation to define the center of scaling.
Step 3:
Choose a representation for the motion-displacement curve.
represent the motion-displacement as cubic B-splines
with uniformly spaced control points.
Step 4:
Solve the non-linear constraint problem for a displacement
that when added to step(2) provides motion that satisfies the constraints.
Final Form of the equation:
minimize 0.5 * xT * x subject to f(x) = C,
where f is a function of x, the control points, and
C is a column vector of size equal to the total number of constraints.
Solve the above equation iteratively using a Sequential Quadratic
Programming (SQP) solver.
Conclusion
This paper presented an approach to retargetting motions from one character
to another by posing the problem of computing an adaptation as a constrained
optimization problem.
They used geometric constraints, simple objective functions and frequency
limitations to realise their approach.
Problems:
-
Large number of constraint equations (>4000 for a simple walking motion).
-
Physically incorrect adapted motion.

Possible Enhancements:
-
Richer set of constraints to include physics constraints, like the mass
of limbs and center of gravity.
Acknowledgments
The material of this report is obtained from the following paper:
Retargetting Motion to New Characters. M. Gleicher. SIGGRAPH
Proceedings '98, pp. 33-42.